CATRINA: Características Tridimensionales para Navegación Autónoma
Entidad financiadora: Direcció General d’Universitat, Estudis Superiors i Ciència. Generalitat Valenciana
Referencia: GV/2014/097
Duración: 2014-2016
Descripción
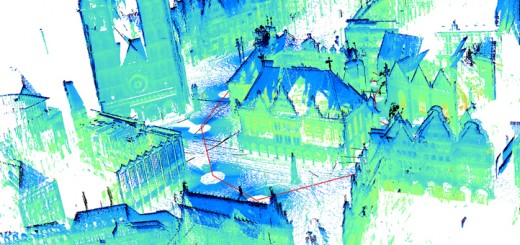
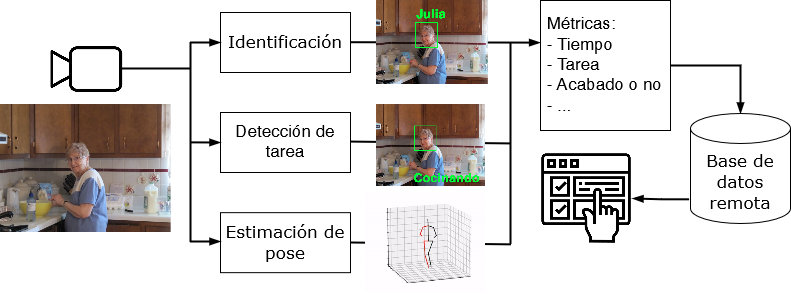
El objetivo del proyecto es el desarrollo de mecanismos visuales de reconocimiento de objetos y lugares, y la localización de los mismos en mapas 3D para facilitar la interacción de un robot autónomo con personas, especialmente con mayores. Cada vez más, los robots incorporan sensores de visión como fuente principal de información. El adecuado modelado 3D de su entorno, que es dinámico, a partir de esos datos visuales permite una mejor toma de decisiones al robot, aumentando su autonomía y las aplicaciones realizables. En general esta funcionalidad no está resuelta con la robustez, agilidad y flexibilidad necesarias para aplicaciones reales. Además de las cámaras convencionales, el uso de sensores visuales RGB-D y la aceleración de los procesos al utilizar técnicas de GPU abren nuevas posibilidades que se explorarán en este proyecto. Los objetivos que perseguimos con el proyecto son: 1. Obtener un modelado visual 3D robusto y eficiente. 2. Desarrollar métodos de reconocimiento robusto de lugares y objetos.
Objetivos
- Desarrollar nuevas técnicas en la extracción de características aplicables a datos 3D, independientemente del sensor utilizado, con especial interés en los sensores RGB-D.
- Desarrollar técnicas de reconocimiento y categorización de objetos desde datos 3D, para mejorar la reconstrucción automática de mapas tridimensionales.
- Estudiar la viabilidad de aplicar técnicas de aceleración GPU a los algoritmos de visión 3D.
Personal
- Dr. Diego Viejo Hernando
- Dra. María Isabel Alfonso Galipienso
- D. Javier Montoyo Bojo
- Dña. Cristina Pomares Puig
Resultados del proyecto
Tesis defendidas
Congresos
Revistas
![]()