Creation of dataset:
A public dataset is created to measure and verify the performance of our methodology. In this dataset, we measure the light position and angle relative to the Kinect scenes. The dataset contains multiple different scenes recorded by the Kinect, where we have known positions of the light sources, the scene surface points and registered colour data. This dataset will be made publicly available after the publication.
The actual dataset contains 6 different scenarios with a total number of 17 different light positions. It makes a total of 23 experiments where
we have tested our method. Each experiment is composed by the pointcloud of the scene in PLY format and the RGB image captured using the Kinect sensor.
The pointcloud file in PLY format contains the position of the points in the scene, the estimated normals and the color information for every point. This
files can be easily readed using the PointCloud library (PCL) ![]()
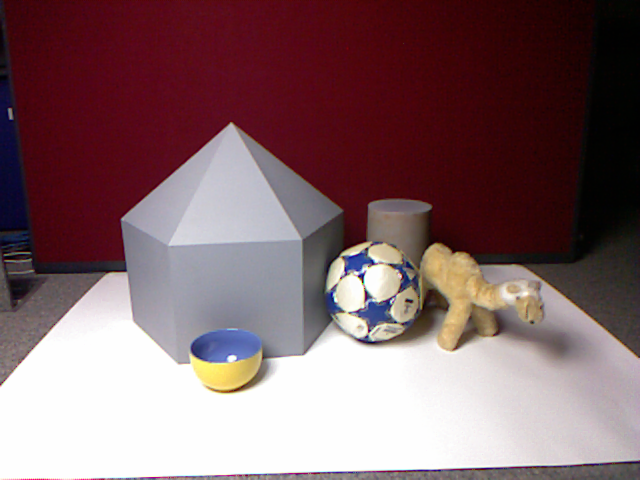
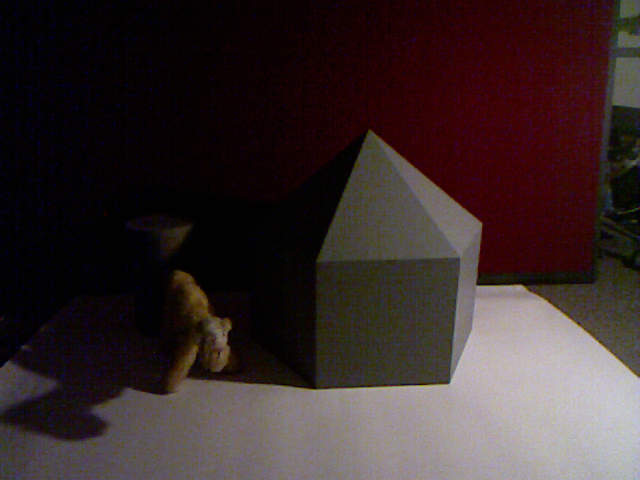
Scene 1:
-
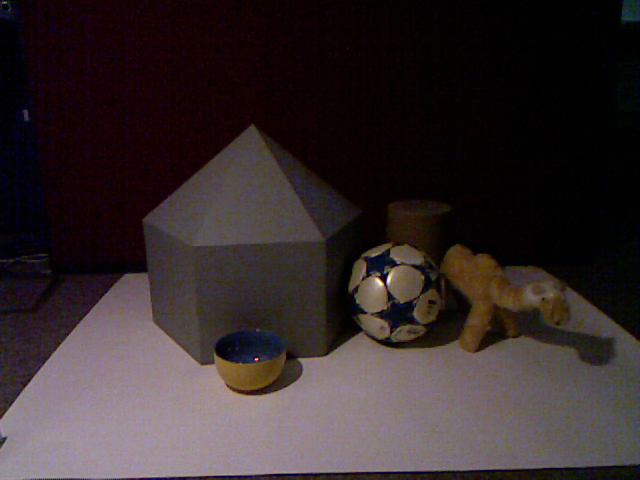
Experiment 1.
-

Experiment 2.
-
Experiment 4.
Scene 2:
-

Experiment 6.
-

Experiment 7
-

Experiment 8
Scene 3:
-
Experiment 9.
-

Experiment 10.
Scene 4:
-
Experiment 11.
-

Experiment 12.
Scene 5:
-

Experiment 13.
-

Experiment 14.
-

Experiment 15.
Scene 6:
-

Experiment 16_274.
-

Experiment 16_306.
-

Experiment 17_190.